定点カメラで撮影した映像データを基にイレギュラーな運転挙動も抽出
顧客 : 完成車メーカー様
概要
自動車内部の制御アルゴリズムを交通流シミュレータ上に反映し、交通流への影響を評価
手動運転から自動運転への過渡期において、自動運転車や支援機能付きの車両は、様々な個性のある手動運転車が周囲を走行している環境の中で安全かつスムーズに走行できる必要があります。そのため自動運転や運転支援機能の評価を行う際は、多様な運転挙動をとる交通流環境をシミュレーションで再現し、その中で機能がどのように動作するか、周囲への影響はどうなるかを確認することが重要です。
この事例では、複数の交通流シミュレーターから抽出した複数の車両挙動モデルを組合せることで、現実に発生した運転挙動を広くカバーする交通流環境の生成を行いました。定点カメラで撮影した映像から取得した実際の車両軌跡や速度の変化などの特徴量とシミュレーション結果を比較することで、実データに含まれる多様な運転をどれだけ網羅できているか検証を行い、イレギュラーな運転挙動の抽出も行いました。
ソリューション
ポイント1. 車両走行軌跡データの取得
複数の高速道路合流箇所の映像データから車両の軌跡をトレースして抽出し、走行軌跡と速度の特徴量をヒートマップの形で整理しました。

ポイント2. 複数の車両挙動モデルの組合せ
本事例のメインシミュレータとして使用したPTV Vissimでは、車両挙動のモデルとしてWiedemann 99モデルを使用しており、車両の動作を主に「自由走行」「接近」「追従」「停車」の4つのモードで表現しています。本事例では、オープンソースの交通流シミュレータSUMOで使用されている車線変更モデルや先行車追従モデル (Kraussモデル) を追加し、1つのシミュレータだけでは表現できない車両の動きを表現可能にしました。
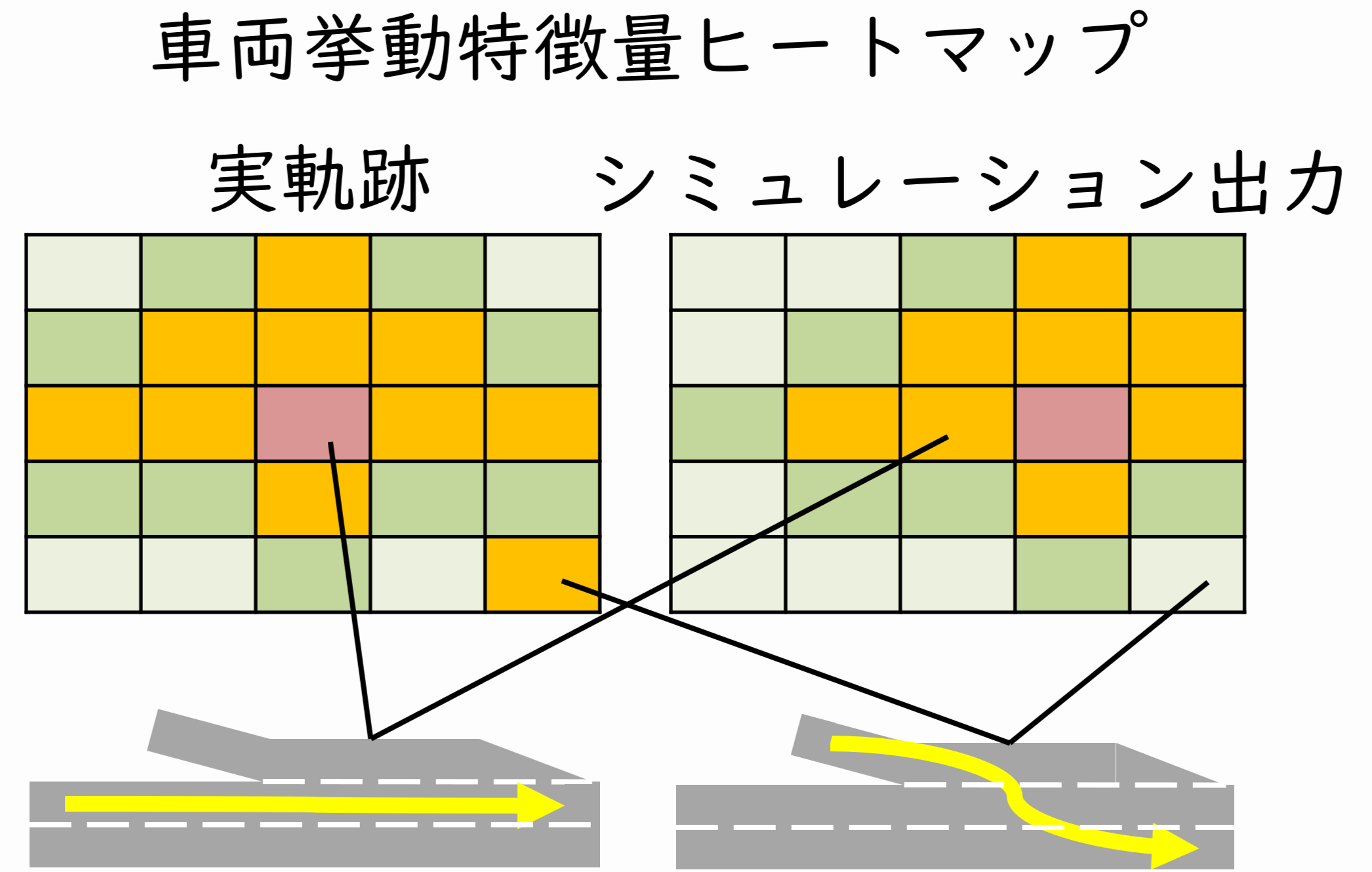
ポイント3. パラメータの変更で多様な運転挙動を再現し、実データに対する網羅性を検証
各々の車両挙動モデルの中にも、車両の挙動に影響するパラメータが複数あります。これらのパラメータを変更させながらシミュレーションを行い、様々な運転挙動が登場する交通流環境をシミュレーションで再現しました。シミュレーションで得られた運転挙動は特徴量のヒートマップを用いてグループ化し、実軌跡のヒートマップと比較して網羅性を確認しました。シミュレーションで表現しきれないイレギュラーな運転もあぶり出し、分析を行いました。
モビリティ・交通のオペレーションズ・リサーチに関するお問い合わせ
本事例のシミュレーションスタディに関するお問い合わせは、下記フォームにご入力ください。